|
The Robot Application Programming Interface Delegate Project
|

|
|
The Robot Application Programming Interface Delegate Project
|
|
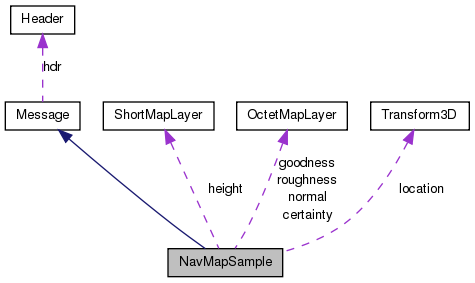
Telemetry data structure for transfering maps.
import "NavMapSample.idl";
Public Attributes | |
| public long | tileId [2] |
| The x,y integer tile idenitifier. | |
| public Transform3D | location |
| Location of the map in the reference frame. | |
| public ShortMapLayer | height |
| Map layer of height fields (DEM). | |
| public OctetMapLayer | goodness |
| Map layer with traversability assessments. | |
| public OctetMapLayer | roughness |
| Roughness of terrain. | |
| public OctetMapLayer | certainty |
| Map layer with confidence values for the associated traversability asessment. | |
| public OctetMapLayer | normal |
| Map layer with cell normal vectors. | |
| public OctetMapLayer certainty |
| public OctetMapLayer goodness |
Goodness is derived value from roughness, slope & vehicle parameters.
| public ShortMapLayer height |
| public Transform3D location |
This is a 6 dof pose, so far all our mapping algorithms only deal with rotations around the z-axis.
| public OctetMapLayer normal |
Two or three entries per pixel, packed layout.
| public OctetMapLayer roughness |
| public long tileId[2] |
 1.7.3
1.7.3 
