- Warning:
- The information contained in these pages is not complete, and may be wrong or out of date.
- Introduction
- The Robot Application Programming Interface Delegate (RAPID) is a set of software data structures and routines that simplify the process of communicating between multiple diverse robots and their command and control systems. RAPID is not intended to be an all-encompassing API for robot communication, but rather it’s a compatibility layer that permits tools and robotic assets to exchange data and information and allows operators to communicate with heterogeneous robots in a uniform way. RAPID is a compatibility layer that delegates information between robots that speak different languages.
- The RAPID specification includes definitions and APIs for messages and services that support supervisory telerobotics operations over near-Earth time delay. RAPID is not a middleware specification, although safety and time-delay capabilities do imply requirements on implementing middleware systems. As currently implemented, the RAPID system can be considered a software reference implementation for remote operations.
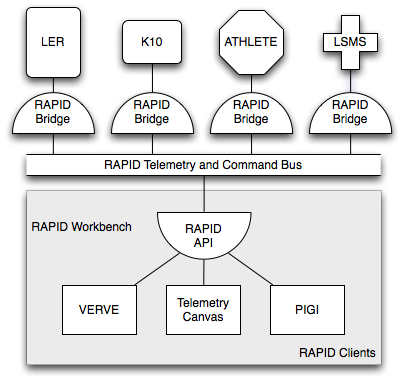
RAPID Software Architecture
- RAPID Documentation Structure
- This documentation set is divided into two major parts: the Descriptive pages (such as the one you're reading right now), and the pages generated by Doxygen from various RAPID source files (such as AccessControlState.idl). Locate Descriptive pages using link outlined in red below. For documentation on specific classes, routines, etc., use the link outlined in blue below.
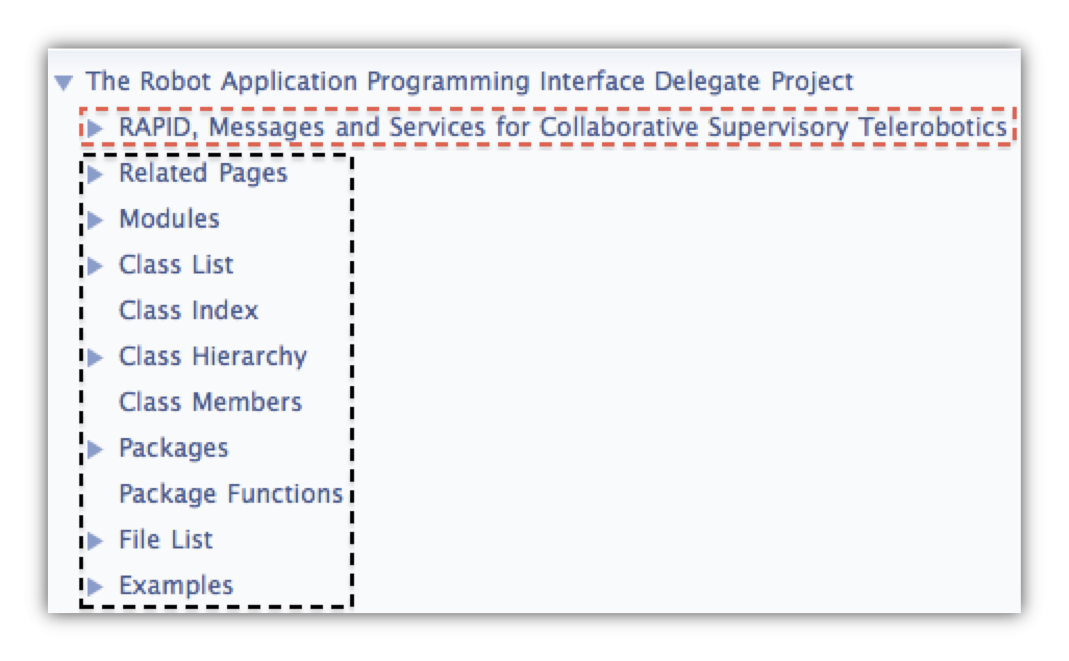
RAPID Documentation Structure
Various indexes provide access to documentation on specific classes, routines, etc., while the Descriptive pages have this general outline:

 1.7.3
1.7.3 
