|
The Robot Application Programming Interface Delegate Project
|

|
|
The Robot Application Programming Interface Delegate Project
|
|
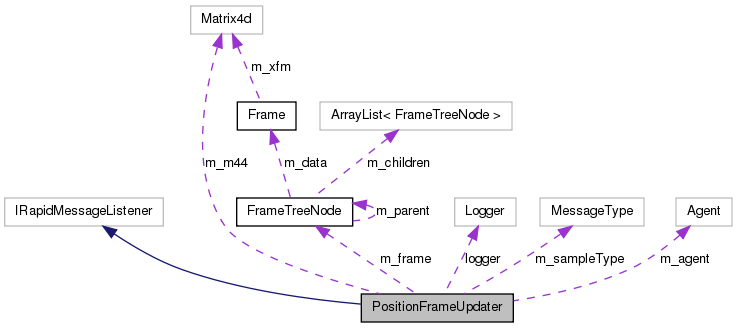
Updates Joint frames for an Agent. More...
Public Member Functions | |
| PositionFrameUpdater (String participantId, Agent agent, MessageType sample) | |
| ROVER. | |
| void | subscribe () |
| void | unsubscribe () |
| void | onRapidMessageReceived (Agent agent, MessageType msgType, Object eventObj, Object configObj) |
| String | substitute (String inString) |
| synchronized void | setupFromConfig (PositionConfig config) |
Protected Attributes | |
| final String | m_participant |
| final Agent | m_agent |
| final MessageType | m_sampleType |
| String | m_jointGroupName |
| int | m_lastConfigSerialId = -13 |
| FrameTreeNode | m_frame = null |
| final Matrix4d | m_m44 = new Matrix4d() |
| PositionFrameUpdater | ( | String | participantId, |
| Agent | agent, | ||
| MessageType | sample | ||
| ) |
| agent | |
| sample |
| void onRapidMessageReceived | ( | Agent | agent, |
| MessageType | msgType, | ||
| Object | eventObj, | ||
| Object | configObj | ||
| ) |

| synchronized void setupFromConfig | ( | PositionConfig | config | ) |

| void subscribe | ( | ) |
| String substitute | ( | String | inString | ) |
| void unsubscribe | ( | ) |
final Agent m_agent [protected] |
FrameTreeNode m_frame = null [protected] |
String m_jointGroupName [protected] |
int m_lastConfigSerialId = -13 [protected] |
final Matrix4d m_m44 = new Matrix4d() [protected] |
final String m_participant [protected] |
final MessageType m_sampleType [protected] |
 1.7.3
1.7.3 
