|
The Robot Application Programming Interface Delegate Project
|

|
|
The Robot Application Programming Interface Delegate Project
|
|
Public Member Functions | |
| SingleAxisFrameUpdater (FrameTreeNode node, Frame.Axis axis, double radians) | |
| void | set (FrameTreeNode node, Frame.Axis axis, double radians) |
| void | setRadians (double radians) |
| void | apply () |
| apply update to frame | |
Protected Attributes | |
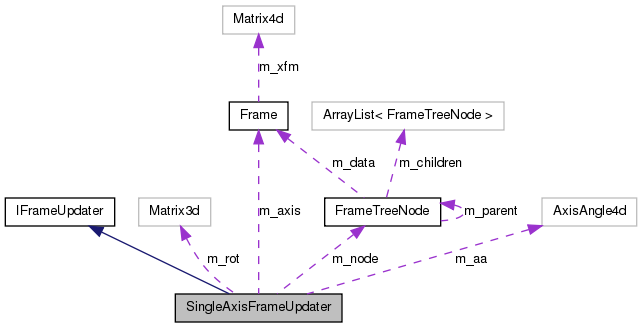
| final AxisAngle4d | m_aa = new AxisAngle4d() |
| final Matrix3d | m_rot = new Matrix3d() |
| FrameTreeNode | m_node = null |
| Frame.Axis | m_axis = Frame.Axis.Z |
| double | m_radians = 0 |
| SingleAxisFrameUpdater | ( | FrameTreeNode | node, |
| Frame.Axis | axis, | ||
| double | radians | ||
| ) |
| void apply | ( | ) |
| void set | ( | FrameTreeNode | node, |
| Frame.Axis | axis, | ||
| double | radians | ||
| ) |
| void setRadians | ( | double | radians | ) |
final AxisAngle4d m_aa = new AxisAngle4d() [protected] |
Frame.Axis m_axis = Frame.Axis.Z [protected] |
FrameTreeNode m_node = null [protected] |
double m_radians = 0 [protected] |
final Matrix3d m_rot = new Matrix3d() [protected] |
 1.7.3
1.7.3 

