|
The Robot Application Programming Interface Delegate Project
|

|
|
The Robot Application Programming Interface Delegate Project
|
|
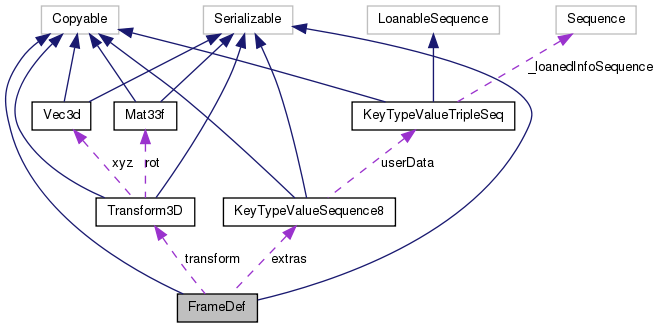
Frame Definition.
Public Member Functions | |
| FrameDef () | |
| FrameDef (FrameDef other) | |
| boolean | equals (Object o) |
| int | hashCode () |
| Object | copy_from (Object src) |
This is the implementation of the Copyable interface. | |
| String | toString () |
| String | toString (String desc, int indent) |
Static Public Member Functions | |
| static Object | create () |
Public Attributes | |
| String | name = "" |
| The name of the frame. | |
| String | parent = "" |
| The name of the parent frame. | |
| gov.nasa.rapid.idl.dds.rapid.Transform3D | transform = (gov.nasa.rapid.idl.dds.rapid.Transform3D) gov.nasa.rapid.idl.dds.rapid.Transform3D.create() |
| The coordinate frame transform. | |
| gov.nasa.rapid.idl.dds.rapid.KeyTypeValueSequence8 | extras = (gov.nasa.rapid.idl.dds.rapid.KeyTypeValueSequence8) gov.nasa.rapid.idl.dds.rapid.KeyTypeValueSequence8.create() |
| Sequence of extra values stored with the frame, such as lat/lon for UTM-grid frames. | |
| FrameDef | ( | ) |
| Object copy_from | ( | Object | src | ) |
This method will perform a deep copy of src This method could be placed into FrameDefTypeSupport rather than here by using the -noCopyable option to rtiddsgen.
| src | The Object which contains the data to be copied. |
this. | NullPointerException | If src is null. |
| ClassCastException | If src is not the same type as this. |

| static Object create | ( | ) | [static] |

| boolean equals | ( | Object | o | ) |

| int hashCode | ( | ) |

| String toString | ( | String | desc, |
| int | indent | ||
| ) |

| String toString | ( | ) |
| gov.nasa.rapid.idl.dds.rapid.KeyTypeValueSequence8 extras = (gov.nasa.rapid.idl.dds.rapid.KeyTypeValueSequence8) gov.nasa.rapid.idl.dds.rapid.KeyTypeValueSequence8.create() |
| String name = "" |
| String parent = "" |
This can contain a (partial) path to ensure uniqueness. An empty parent name denotes a root frame. The C++ implementation will always put the fully qualified path in there for starters.
| gov.nasa.rapid.idl.dds.rapid.Transform3D transform = (gov.nasa.rapid.idl.dds.rapid.Transform3D) gov.nasa.rapid.idl.dds.rapid.Transform3D.create() |
For frames updated by telemetry (...Sample messages), this does not change with updates of the acutal value, but only contains the start configuration.
 1.7.3
1.7.3 

