|
The Robot Application Programming Interface Delegate Project
|

|
|
The Robot Application Programming Interface Delegate Project
|
|
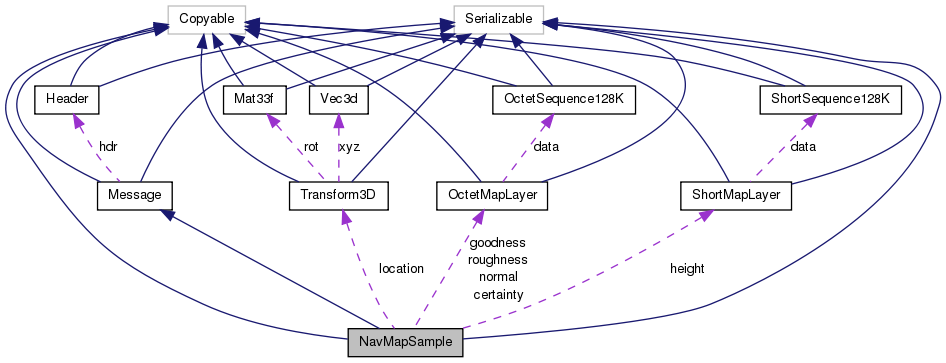
Map layer data for data samples reduced to 8 bit values. More...
Public Member Functions | |
| NavMapSample () | |
| NavMapSample (NavMapSample other) | |
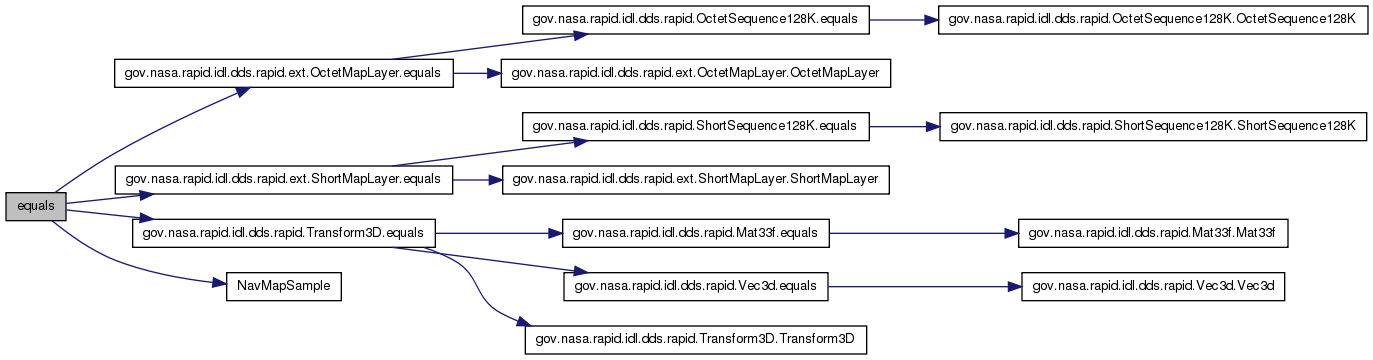
| boolean | equals (Object o) |
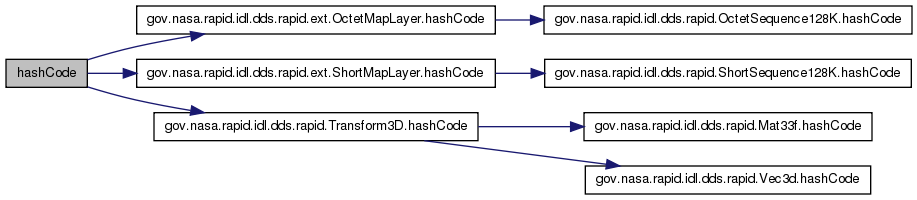
| int | hashCode () |
| Object | copy_from (Object src) |
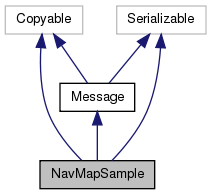
This is the implementation of the Copyable interface. | |
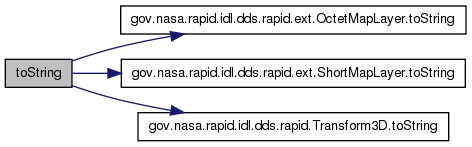
| String | toString () |
| String | toString (String desc, int indent) |
Static Public Member Functions | |
| static Object | create () |
Public Attributes | |
| int[] | tileId = new int[2] |
| The x,y integer tile idenitifier. | |
| gov.nasa.rapid.idl.dds.rapid.Transform3D | location = (gov.nasa.rapid.idl.dds.rapid.Transform3D) gov.nasa.rapid.idl.dds.rapid.Transform3D.create() |
| Location of the map in the reference frame. | |
| gov.nasa.rapid.idl.dds.rapid.ext.ShortMapLayer | height = (gov.nasa.rapid.idl.dds.rapid.ext.ShortMapLayer) gov.nasa.rapid.idl.dds.rapid.ext.ShortMapLayer.create() |
| Map layer of height fields (DEM). | |
| gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer | goodness = (gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer) gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer.create() |
| Map layer with traversability assessments. | |
| gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer | roughness = (gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer) gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer.create() |
| Roughness of terrain. | |
| gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer | certainty = (gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer) gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer.create() |
| Map layer with confidence values for the associated traversability asessment. | |
| gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer | normal = (gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer) gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer.create() |
| Map layer with cell normal vectors. | |
Data structure holding a vector of data points. To reduce footprint, the data is sent as 8 bit values (octet). The data-structure holds an offset and a scaling factor, to restore the original data samples. e.g. double value = data * scale + offset The density parameter allows a layer to be of lower resolution than the map itself. Map layer data for data samples reduced to 16 bit values. Data structure holding a vector of data points. To reduce footprint, the data is sent as 16 bit values (short). The data-structure holds an offset and a scaling factor, to restore the original data samples. e.g. double value = data * scale + offset The density parameter allows a layer to be of lower resolution than the map itself. Telemetry data structure for transfering maps.
| NavMapSample | ( | ) |
| NavMapSample | ( | NavMapSample | other | ) |
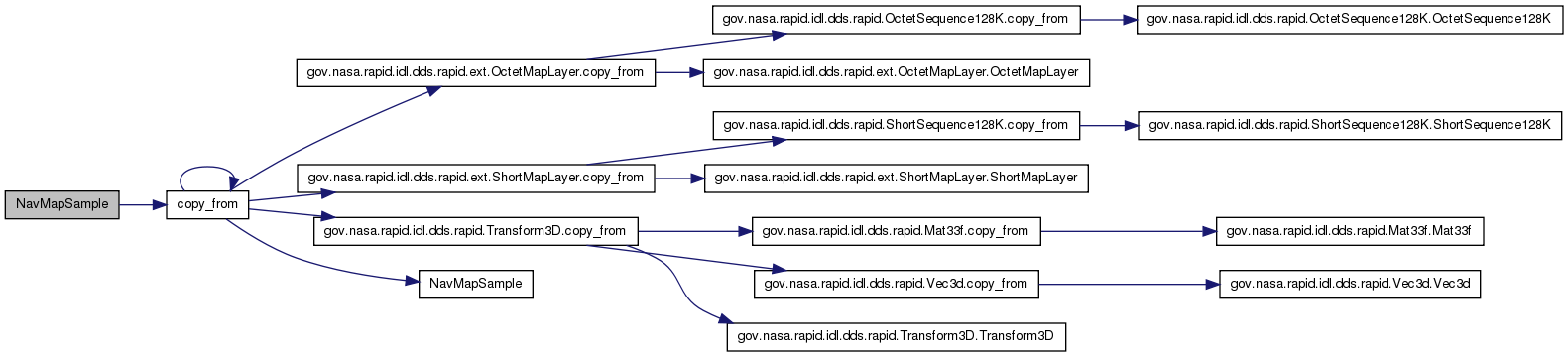
| Object copy_from | ( | Object | src | ) |
This method will perform a deep copy of src This method could be placed into NavMapSampleTypeSupport rather than here by using the -noCopyable option to rtiddsgen.
| src | The Object which contains the data to be copied. |
this. | NullPointerException | If src is null. |
| ClassCastException | If src is not the same type as this. |
Reimplemented from Message.

| static Object create | ( | ) | [static] |
| boolean equals | ( | Object | o | ) |
| int hashCode | ( | ) |
| String toString | ( | String | desc, |
| int | indent | ||
| ) |
| String toString | ( | ) |
Reimplemented from Message.
| gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer certainty = (gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer) gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer.create() |
| gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer goodness = (gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer) gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer.create() |
Goodness is derived value from roughness, slope & vehicle parameters.
| gov.nasa.rapid.idl.dds.rapid.ext.ShortMapLayer height = (gov.nasa.rapid.idl.dds.rapid.ext.ShortMapLayer) gov.nasa.rapid.idl.dds.rapid.ext.ShortMapLayer.create() |
| gov.nasa.rapid.idl.dds.rapid.Transform3D location = (gov.nasa.rapid.idl.dds.rapid.Transform3D) gov.nasa.rapid.idl.dds.rapid.Transform3D.create() |
This is a 6 dof pose, so far all our mapping algorithms only deal with rotations around the z-axis.
| gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer normal = (gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer) gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer.create() |
Two or three entries per pixel, packed layout.
| gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer roughness = (gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer) gov.nasa.rapid.idl.dds.rapid.ext.OctetMapLayer.create() |
| int [] tileId = new int[2] |
 1.7.3
1.7.3