|
The Robot Application Programming Interface Delegate Project
|

|
|
The Robot Application Programming Interface Delegate Project
|
|
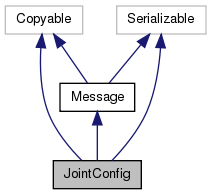
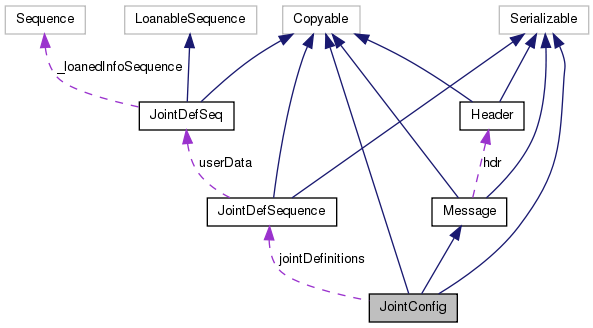
JointDef defines the frame and DOF for a specific Agent's joints. More...
Public Member Functions | |
| JointConfig () | |
| JointConfig (JointConfig other) | |
| boolean | equals (Object o) |
| int | hashCode () |
| Object | copy_from (Object src) |
This is the implementation of the Copyable interface. | |
| String | toString () |
| String | toString (String desc, int indent) |
Static Public Member Functions | |
| static Object | create () |
Public Attributes | |
| String | jointGroupName = "" |
| Name of the joint group. | |
| gov.nasa.rapid.idl.dds.rapid.JointDefSequence | jointDefinitions = (gov.nasa.rapid.idl.dds.rapid.JointDefSequence) gov.nasa.rapid.idl.dds.rapid.JointDefSequence.create() |
| JointDefs for each joint. | |
Joint configuration of a kinematic chain. Gives configuration of joint data for a specific Agent. Joint data is delivered using JointSample.
| JointConfig | ( | ) |
| JointConfig | ( | JointConfig | other | ) |

| Object copy_from | ( | Object | src | ) |
This method will perform a deep copy of src This method could be placed into JointConfigTypeSupport rather than here by using the -noCopyable option to rtiddsgen.
| src | The Object which contains the data to be copied. |
this. | NullPointerException | If src is null. |
| ClassCastException | If src is not the same type as this. |
Reimplemented from Message.

| static Object create | ( | ) | [static] |
| boolean equals | ( | Object | o | ) |
| int hashCode | ( | ) |
| String toString | ( | String | desc, |
| int | indent | ||
| ) |
| String toString | ( | ) |
Reimplemented from Message.
| gov.nasa.rapid.idl.dds.rapid.JointDefSequence jointDefinitions = (gov.nasa.rapid.idl.dds.rapid.JointDefSequence) gov.nasa.rapid.idl.dds.rapid.JointDefSequence.create() |
| String jointGroupName = "" |
 1.7.3
1.7.3 




