|
The Robot Application Programming Interface Delegate Project
|

|
|
The Robot Application Programming Interface Delegate Project
|
|
Classes | |
| class | JointSampleData |
Public Member Functions | |
| RapidJointSample (JointSample sample, JointConfig config, Map< String, DataTypeIndex > keyIndexes) | |
| void | setJointData (int index, float anglePos, float angleVel, float angleAcc, float current, float torque, float temperature, int statusCode, NamedFloatSequence aux) |
| This holds the array of values in the sequence provided. | |
| void | setJointData (String frameName, float anglePos, float angleVel, float angleAcc, float current, float torque, float temperature, int statusCode, NamedFloatSequence aux) throws InvalidFrameNameException |
| void | setJointData (float anglePos, float angleVel, float angleAcc, float current, float torque, float temperature, int statusCode, NamedFloatSequence aux) |
| int | getIndexForJoint (String frameName) |
| int | getIndexForJoint (JointDef jointDef) |
| JointDef | getJointDef (int index) |
| void | setJointData (int index, float anglePos, float angleVel, float angleAcc, float current, float torque, float temperature, int statusCode) |
| float[] | getAuxFloatArray (int index) |
| float[] | getJointData (int index) |
| List< JointSampleData > | getAllJoints () |
| Returns all joint data in an array of JointSampleDatum. | |
| void | initMaxSizeForJointDataArrays (int max) |
| void | trimJointDataArrayToSize (int max) |
| NamedFloatSequence | createAuxFloatDataForJoint (String name, float[] auxValues) |
| String | toString () |
| void | initializeVariables () |
| ensure that there is no way to send over a null through the wire | |
| Copyable | getCopyable () |
| Copyable | getConfig () |
| void | populateTopLevelAttributes () |
| MAE-4255: create top level access variables to simplify access. | |
Public Attributes | |
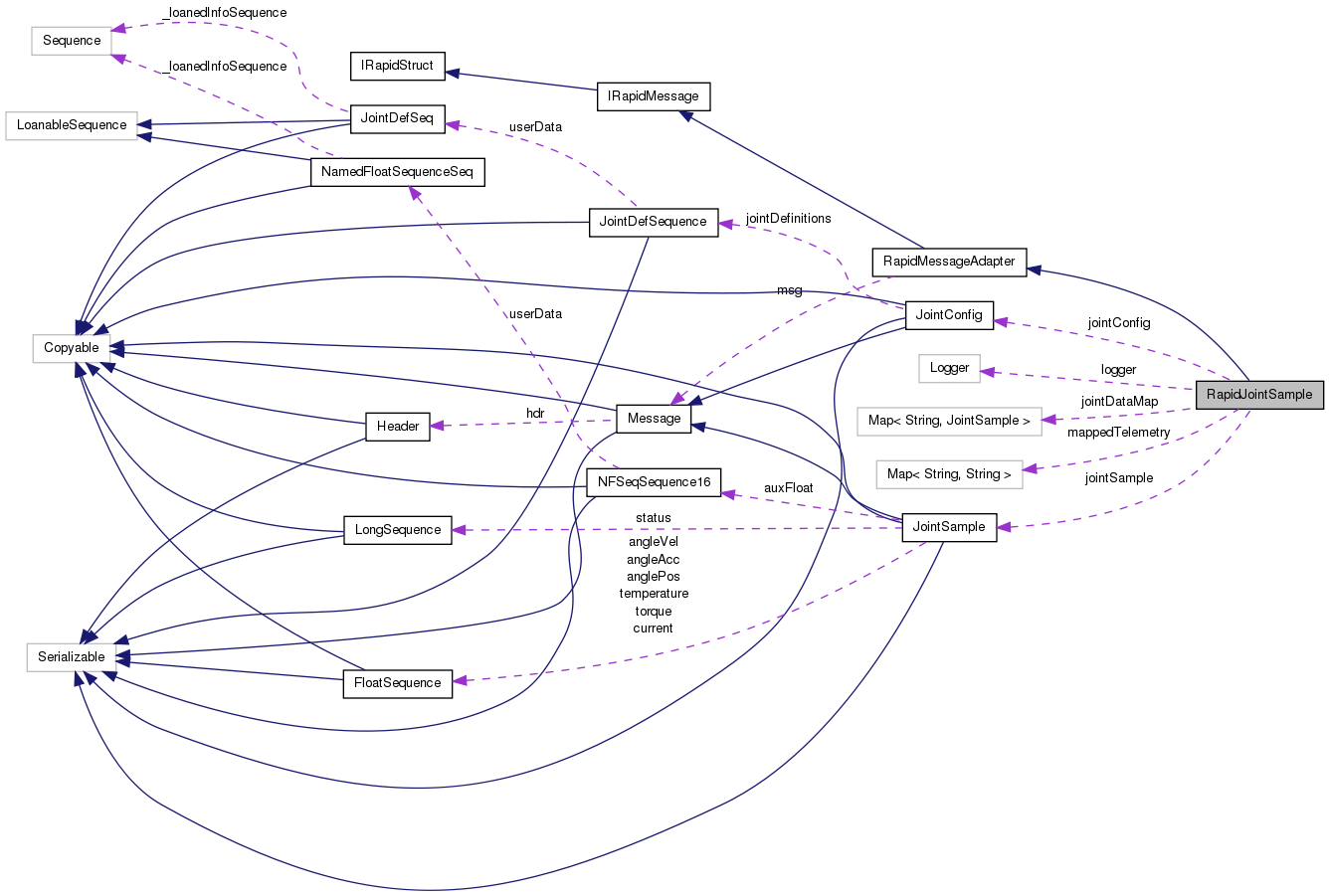
| JointSample | jointSample |
| JointConfig | jointConfig |
| Map< String, JointSample > | jointDataMap = new LinkedHashMap<String, JointSample>() |
| Map< String, String > | mappedTelemetry = new LinkedHashMap<String, String>() |
| RapidJointSample | ( | JointSample | sample, |
| JointConfig | config, | ||
| Map< String, DataTypeIndex > | keyIndexes | ||
| ) |
| NamedFloatSequence createAuxFloatDataForJoint | ( | String | name, |
| float[] | auxValues | ||
| ) |
| List<JointSampleData> getAllJoints | ( | ) |
Each JointSampleDatum contains all the values associated with a single joint.
| float [] getAuxFloatArray | ( | int | index | ) |
| Copyable getConfig | ( | ) |
| Copyable getCopyable | ( | ) |
Reimplemented from RapidMessageAdapter.
| int getIndexForJoint | ( | JointDef | jointDef | ) |

| int getIndexForJoint | ( | String | frameName | ) |
| float [] getJointData | ( | int | index | ) |
| JointDef getJointDef | ( | int | index | ) |
| void initializeVariables | ( | ) |
Reimplemented from RapidMessageAdapter.
| void initMaxSizeForJointDataArrays | ( | int | max | ) |
| void populateTopLevelAttributes | ( | ) |
Reimplemented from RapidMessageAdapter.
| void setJointData | ( | int | index, |
| float | anglePos, | ||
| float | angleVel, | ||
| float | angleAcc, | ||
| float | current, | ||
| float | torque, | ||
| float | temperature, | ||
| int | statusCode | ||
| ) |

| void setJointData | ( | float | anglePos, |
| float | angleVel, | ||
| float | angleAcc, | ||
| float | current, | ||
| float | torque, | ||
| float | temperature, | ||
| int | statusCode, | ||
| NamedFloatSequence | aux | ||
| ) |
| void setJointData | ( | int | index, |
| float | anglePos, | ||
| float | angleVel, | ||
| float | angleAcc, | ||
| float | current, | ||
| float | torque, | ||
| float | temperature, | ||
| int | statusCode, | ||
| NamedFloatSequence | aux | ||
| ) |
The values must be added a the same time in order to ensure the order of the data structure arrays.
The status code is found in the actual classes:
J_ENABLED J_DISABLED J_FROZEN J_ESTOP J_FAILURE J_OVER_CURRENT
To send a status:
public void setJointData(float anglePos, float angleVel, float angleAcc, float current, float torque, float temp, int code) { int code = getJointStatusCode(); jointData.addJointData( anglePos, angleVel, angleAcc, current, torque, temp, code); }
public int getJointStatusCode() { switch (currentJointStatus) { case (J_ENABLED.VALUE): return J_ENABLED.VALUE; break; case (J_DISABLED.VALUE): return J_DISABLED.VALUE; break; case (J_FROZEN.VALUE) return J_FROZEN.VALUE; break; case (J_ESTOP.VALUE): return J_ESTOP.VALUE; break; case (J_FAILURE.VALUE): return J_FAILURE.VALUE; break; case (J_OVER_CURRENT.VALUE): return J_OVER_CURRENT.VALUE; break; } }
| index | |
| anglePos | |
| angleVel | |
| angleAcc | |
| current | |
| torque | |
| temperature | |
| statusCode | |
| aux |
| void setJointData | ( | String | frameName, |
| float | anglePos, | ||
| float | angleVel, | ||
| float | angleAcc, | ||
| float | current, | ||
| float | torque, | ||
| float | temperature, | ||
| int | statusCode, | ||
| NamedFloatSequence | aux | ||
| ) | throws InvalidFrameNameException |

| String toString | ( | ) |
| void trimJointDataArrayToSize | ( | int | max | ) |
| Map<String, JointSample> jointDataMap = new LinkedHashMap<String, JointSample>() |
| Map<String, String> mappedTelemetry = new LinkedHashMap<String, String>() |
 1.7.3
1.7.3 

